Want to join in? Respond to our weekly writing prompts, open to everyone.
The Mortar of Life
from vibrations
Images are the reminders of the mortar that bind our lives.

It was always a dream of mine (and still is) to travel. And I mean travel as in get lost in places I never thought I’d go. Faraway places that people have to get map to find.
Quiet, forgotten places. They, like any small beautiful thing, will have their own unique beauty. And if no one else has seen it, all the better. It’s still amazing. And I find that irresistible.
A continuation of Dear Diary #61 – where upon i pontificate and put my hand upon the things behind.
The one about traveling more.
12:00am
Looking for photos of some places and ran across shots from 1997... three people who I would watch grow from tiny humans to real adults. They've changed and become amazing. Some failures, many successes. And I look in their eyes and think how they must have looked up to me all those years ago and formany years tocome.
Thenk something would break. And everything changed. andd now I think... one's eyes would burn with anger, a second with indifference – having largely forgotten me... and the third... the third, I think perhaps she would see me and I would recognize disappointment and sadness, but understanding and compassion.
And for that small gift... I thank God. For that kind of love is hard to find.
And I see other photos of a life lived robustly and wonder how I landed here in Dust Meridian, in teh middle of the night with tears in my eyes, wondering if everythign is gonna be alright.
I don't mind the scars, honestly. I have so many. We all do. I'll bet your scars make you in to teh person you are too. Would you trade them? Some, maybe. But mostly, who want's to forget who they are? Give up the life they've built, the loves and achievements. The goodness that flows from them?
No, the scars are okay. It's the raw wounds that I think both can agree we'd rather do without.
I broke my left leg when I was seven. Tibia and fibia. I was jumping on the bed in the upstairs of my parents house when she got jealous of my superior jumping skills (obviously) and pushed me into open air at the zenith of my jump.
Crack.
It was miserable. Even now I cannot stand the sound (real or fake) of breaking bones. There's nothing like it.
But I want thememory. The blue walls, the carpet that reminded me of a topographical map. The slanted ceiling. How my mom carried me to the car. All of it.
it's almst as if the worse the pain, the better the memory.

I miss random Saturday's like this. Just a bunch of friends together doing something nice for other people. Nobody getting paid. Everyone happy and suffering doing something kind.
That seems to have been washed away. A closed chapter in a book the I need to take down off theshelf more often.
But don't we ALL need to take our books off the shelf more, both figuratively and literal?
I don't care how good 'real' art is, I think my books might be the greatest thing I ever create.
I am currently finishishing 69 and 72. When I travel, my only real goal is to fill them with as much experience as I can possibly manage. Even if no one ever reads them. They are priceless treasures and I wish more people understood the value of recording the mortar of their lives.

One thing about pain, nothing assuades it like kindesses for others. I'll be glad to wrap my project this week and find something good to do for someone else for a little bit.
Just let them be the twinkle in the night's sky. Only astronauts can go to space. The rest of us worms are doing just fine right were we are.
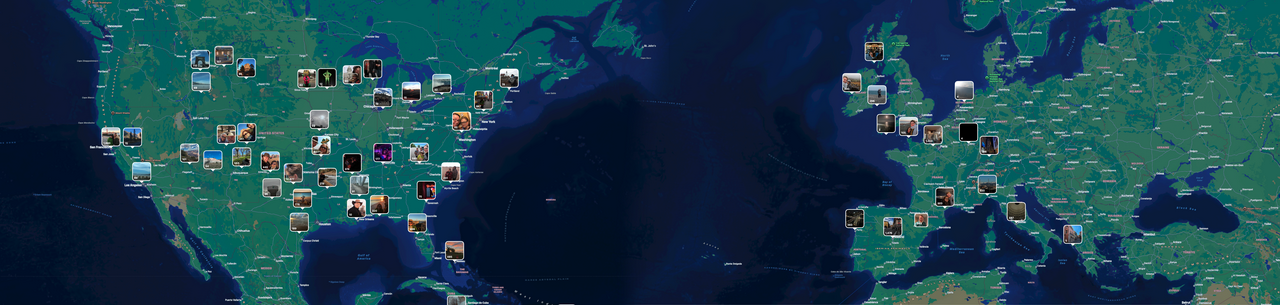
If you are in one these 10k+ images, thank you. I love you. If you aren't, maybe one day you will be.
 Glorious sunrise on the coast of Ghana.
Glorious sunrise on the coast of Ghana.
 Jericah!
Jericah!
 We're so coddled here in the west. In places like this, there was every opportunity to fall to your death. Or drown. Or get picked off by bandits.
We're so coddled here in the west. In places like this, there was every opportunity to fall to your death. Or drown. Or get picked off by bandits.
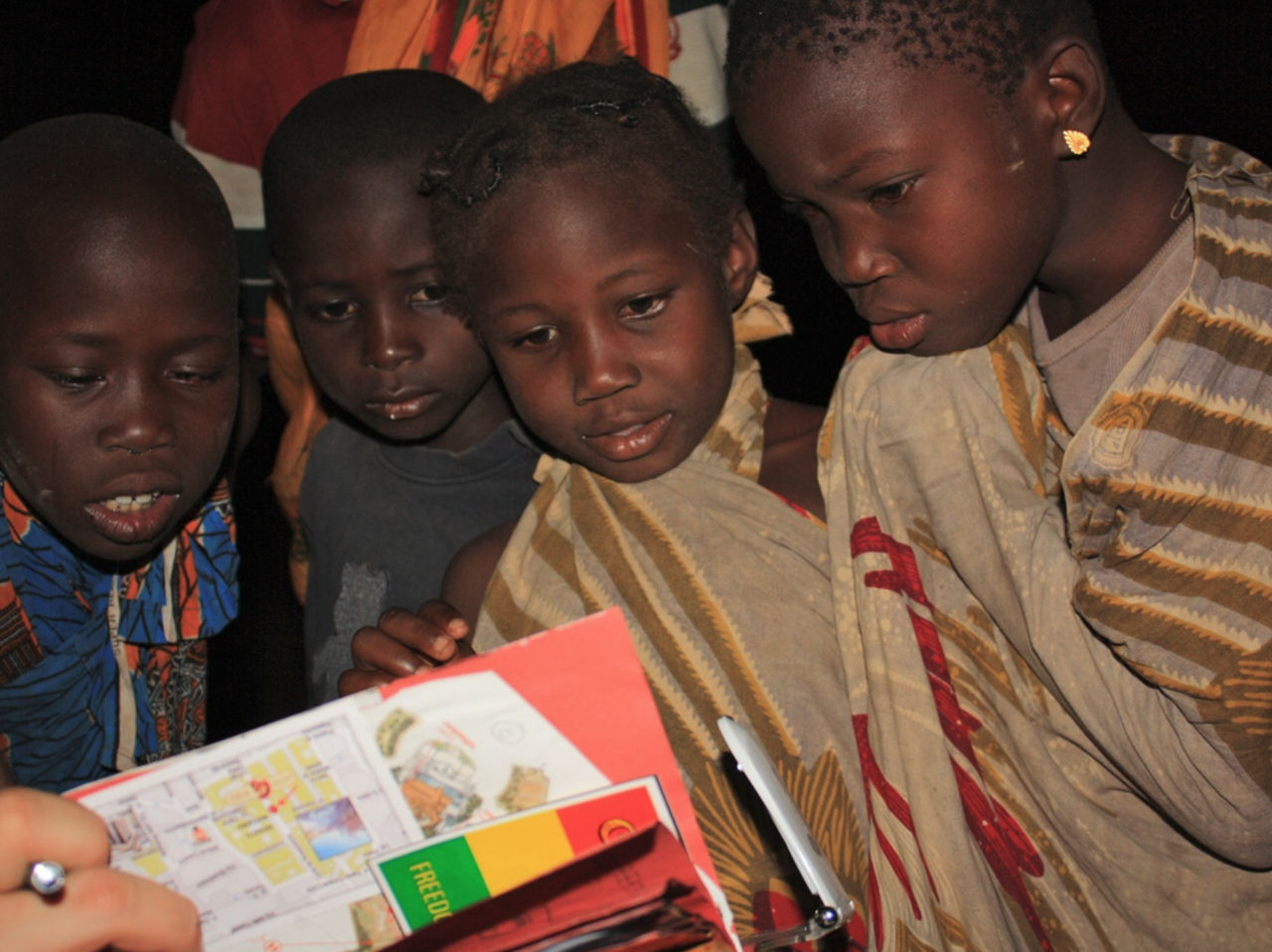 We were in the middle-of-nowhere on the northern border of Ghana. You could see Burkina Faso across the river. The kids there had never seen a white man before. That alone was enough to make me a super star in this little village. When my sketchbook came out, they were mesmerized. The simplest scribbles absolutely captivated them.
We were in the middle-of-nowhere on the northern border of Ghana. You could see Burkina Faso across the river. The kids there had never seen a white man before. That alone was enough to make me a super star in this little village. When my sketchbook came out, they were mesmerized. The simplest scribbles absolutely captivated them.
That was 2010. I like think they're all artists today.
 This is how 'real' adventure happens. And let me tell you, in the moment, it's not great. It takes a certain kind of personality to enjoy suffering just so you can have a great memory. Eating dust for 3 hours is just such a suffering. It's not 'break-your-leg' level of awful, but it's pretty bad.
This is how 'real' adventure happens. And let me tell you, in the moment, it's not great. It takes a certain kind of personality to enjoy suffering just so you can have a great memory. Eating dust for 3 hours is just such a suffering. It's not 'break-your-leg' level of awful, but it's pretty bad.
 This guy got married without realizing it.
This guy got married without realizing it.
 Fires there weren't for entertainment. Here a small boy cozy' sup to the flame for warmth and safety.
Fires there weren't for entertainment. Here a small boy cozy' sup to the flame for warmth and safety.
 I dont' know what it was, but Pfizer should get on whatever they're selling.
I dont' know what it was, but Pfizer should get on whatever they're selling.
 Fishing isn't a sport in Ghana, it's a way of life.
Fishing isn't a sport in Ghana, it's a way of life.
 Every village had a different corporate sponsor. if you had Vodafone, you vilalge was red and white. If Zain, blue and Yellow. Whisking through at speed you knew immediately who had wooed the village elders.
Every village had a different corporate sponsor. if you had Vodafone, you vilalge was red and white. If Zain, blue and Yellow. Whisking through at speed you knew immediately who had wooed the village elders.
 This shot was when I realized that humans really lived like this. It wasn't just imagery in National Geogarphic.
This shot was when I realized that humans really lived like this. It wasn't just imagery in National Geogarphic.

 A father carries his son to worship. The boy (about 3?) will be nineteen in 2026. This photo, which he has no concept or recollection of, captures what will likely be an indelible feeling: first learning to worship the Creator.
A father carries his son to worship. The boy (about 3?) will be nineteen in 2026. This photo, which he has no concept or recollection of, captures what will likely be an indelible feeling: first learning to worship the Creator.
 Fishmen are proud and hard working. And their boats... IDK how to describe them other than to say they are works of art.
Fishmen are proud and hard working. And their boats... IDK how to describe them other than to say they are works of art.

 I made an excelelnt watercolor painting of this shot. I love the color and the composition.
I made an excelelnt watercolor painting of this shot. I love the color and the composition.
 Farmer's day is a national holiday and the beaches are flooded with young Ghanaians out for soccer and the cool ocean breeze.
Farmer's day is a national holiday and the beaches are flooded with young Ghanaians out for soccer and the cool ocean breeze.
 Yes, it's real.
Yes, it's real.
 Ghanaians have a great story about the humbling of the warthog, requireing them to bow when they eat. There are endless proverbs and folk tales in West Africa. I don't know why we dont' get more stories from teh continent. I guess because the West considers them 'black' stories?
Ghanaians have a great story about the humbling of the warthog, requireing them to bow when they eat. There are endless proverbs and folk tales in West Africa. I don't know why we dont' get more stories from teh continent. I guess because the West considers them 'black' stories?
IDK, but Africa was the least black place i ever went. They were just humans, like all of us.
 The ONLY respite in the humid days after the monsoons.
The ONLY respite in the humid days after the monsoons.
 the people are easily the best thing about the country. But in second plae, wthou question: the food.
the people are easily the best thing about the country. But in second plae, wthou question: the food.
 As the guest of honor, I was usually served the fish with the head on. Unsettling, but you got used to it. And it's so delicious, who cares. This thing was swimming that morning and filling my stomach that night. I love coastal living.
As the guest of honor, I was usually served the fish with the head on. Unsettling, but you got used to it. And it's so delicious, who cares. This thing was swimming that morning and filling my stomach that night. I love coastal living.
 The slithering snails were offputting to the rest of my party, but I found them mesmerizing and then later, delicious.
The slithering snails were offputting to the rest of my party, but I found them mesmerizing and then later, delicious.
Well, dear reader, I managed to burn away a full day. I'm exhausted and despite saying I didn't want to stay up until 3am, the clock tolls at nearly that hour now.
Somehere a clock is tick, tick, ticking in the silence of a dark room while a house sleeps.
I have never had good horse sense.
#travel
Doing summer wrong
from  Somewhere in between
Somewhere in between
Sometimes I lose track of the things I wish I was doing so completely that it feels like I blinked and it’s been six months… And so I’m back to writing, no matter how much time has passed.
It’s the beginning of August, and we’re in the middle of a second heatwave when stepping outside feels like living inside a hot oven.
It makes me question this anticipation we seem to reserve for summer and the “living to the fullest” mode it’s supposed to bring.
Every year, someone has to say “It’s finally summer!” with an accompanying picture of something summery. I feel like there’s a social obligation to spend the summer happy, active, and “maximising” your time.
By the end of July, all that anticipation usually leaves me feeling inadequate instead.
Because every time someone asks me about my plans, it seems like they expect some exciting answer. And the last thing I want to do in +37 degrees is be outside. Like, hello, at this point staying inside is practically a public-health recommendation.
I spend much of the year waiting for warmth, only to discover that when it arrives, it has no sense of moderation. Sun, tone it down a little, will you?
On days like these, staying inside, I feel slightly guilty for missing “it”. When I go out, I try to pretend I’m not miserable.
There are a few things to be grateful for today, though. First — that this annoyed me enough to pull me out of the writing slump. Second — the laundry dries really fast on the balcony.
— until the next thought.
from  G A N Z E E R . T O D A Y
G A N Z E E R . T O D A Y

Excited to announce that my long time Emmy-award-winning friend Yasmin Elayat and I have received a generous grant from AFAC to adapt THE SOLAR GRID into a videogame:
THE SOLAR GRID: VIDEO GAME is a narrative adventure set in a post-collapse Earth powered by solar satellites. Players unearth speculative objects revealing buried histories of climate collapse. Knowledge is power. Will the players restore balance or fuel the forces of exploitation?
This is a two-year project that will see a playable demo based on THE SOLAR GRID developed, before we can tap into additional funding sources to take the project further.
#work #tsg
 An Essayist's Notebook
An Essayist's NotebookVoice
Looking back, I realise I spent decades trying to acquire something for which I had no name. Beginning in my teens, I found myself drawn not to answers but to relationships, not to conclusions but to unfolding processes.
Only much later did I understand that what I had been cultivating was a mode of attention. My writing voice was not something I invented. It was something that emerged from that attention. What emerges from my thinking here is a distinction that feels both simple and significant:
Voice is what readers hear. Attention is what produces it.
Perhaps, too: Style can be learned. Voice can be developed. But a mode of attention is cultivated over a lifetime.
I suspect that my development as a writer owed much to skills learned elsewhere. As a motorcyclist, and later as a volunteer RAC examiner, I was trained to observe systematically. Good riders do not merely look. They follow a disciplined process of observation, anticipation and continuous reassessment. Over time I seem to have applied similar disciplines to perception itself. The road became the world. Hazards became questions. Observation became inquiry.
University lecturing taught me another form of attention. I learned to observe not only what students said, but how understanding emerged within them. Often one could sense comprehension taking shape before a student had the words to express it. Teaching required attentiveness to thought in motion, to the subtle interaction between explanation, confusion, recognition and insight.
Social action taught me yet another form of attention. If advanced motorcycling trained me to observe situations and lecturing trained me to observe understanding, social action trained me to observe underlying conditions. It encouraged me to look beyond individual events towards the forces that made them possible. Repeatedly I found that what was visible was only the surface expression of deeper relationships and structures. This habit of looking beneath appearances became part of my writing. It reinforced a tendency to ask not merely what is happening, but what conditions are giving rise to what is happening.
Taken together, these experiences seem less like separate chapters in a life than different expressions of the same discipline. They cultivated habits of watching carefully, tracing relationships, recognising patterns and resisting premature conclusions. If I were to sketch the progression, it might look something like this:
Observation → Systematic Observation → Disciplined Attention → Insight → Voice
The voice comes last. What comes first is the trained capacity to see what others overlook. That capacity was not developed primarily through writing. Writing became the place where the results of that lifelong training found expression.
I was reminded of this some years ago while trying a guitar amplifier in a music shop. Another customer, a landscape gardener in his fifties, recognised my name and struck up a conversation about writing. He told me he wanted to start a blog but had been attending a creative writing course and had come away with the belief that he first needed to acquire a voice.
This took me aback.
Within minutes it was obvious to me that he already had one. He had spent half a century working, observing, thinking, solving problems and making sense of the world. He had a perspective. He had a way of seeing. In short, he had a voice.
What he lacked was not a voice but confidence in it.
He began talking about grammar. I told him to forget grammar for the moment. Write about what you know. Readers will come for your perspective, not your punctuation. Grammar and style can be learned. What mattered was that he had already spent decades cultivating a way of seeing the world. The writing would develop in time.
The encounter stayed with me because it revealed a common misunderstanding. Voice is often treated as though it were a literary technique that must be acquired before one can begin writing. Yet my experience suggests the reverse. Most people acquire a voice through living. They acquire writing through writing.
I do not suggest that every essayist arrives at a voice in this way. This is simply an attempt to understand how my own voice emerged. What continues to deepen it is a subject for another note. Yet the reflection does raise a further question. If my voice emerged from a lifelong mode of attention, what lies behind the voices of other essayists?
I suspect the answer is rarely a matter of style alone. Behind every distinctive voice there may be some equally deep disposition, habit of mind, preoccupation or way of attending to experience. Long before the pen touches paper or the fingers strike the keys, the writer has already spent years, perhaps decades, learning what to notice and what questions cannot be left alone.
Perhaps a mature voice is not something a writer acquires. Perhaps it is what becomes audible when a lifelong way of paying attention finally finds its form.
 David Marshall
Sna Sceirí
David Marshall
Sna Sceirí
An Ambition
This is an ambition for three websites.
Together they publish essays, explore the craft of essay writing, and encourage others to engage in the practice. Each serves a different purpose...
esy.ie · The Essayist's Notebook. A personal notebook with public access. A place to record thoughts, notions and realisations as they arrive. Fragments, observations and questions. Nothing more. The notebook is already underway, with several new posts appearing each week.
essayist.ie · Learning the Craft. A record of what I have learned about essay writing. Part reflection, part practical guide, it explores the craft of constructing and delivering essays, and the lessons discovered along the way. Planned launch: before the end of 2026.
essays.ie · Essays. A home for essays that do not naturally belong elsewhere. The more reflective pieces. The longer explorations. The essays that sit outside Marshall on Policy, The Marshall Review, and An Activist's Notebook. The foundation essays are already in place. The next essay, The Espadrilles, is currently emerging through the process that gives essays their value: following a question wherever intellectual honesty leads.
Progress
esy.ie: active and growing. essays.ie: foundation collection established, new essays in development. essayist.ie: planned and expected to emerge before 2027.
Together, the three sites explore not simply essays as a form of writing, but the essay as a way of thinking.
David Marshall
Sna Sceirí
On politicians
The best policy writing does not corner politicians with gotcha questions.
It changes the terms of the conversation so that simplistic answers become harder to give.
David Marshall
Sna Sceirí
Forearm thirst
from An Open Letter
L asked me what the stupid joke video I posted worked out, and I assumed that she knew that it was forearms and I kind of got excited to show off a little bit and so I sent her the video of my forearms I took after, and apparently it was so much of a thirst trap that she was fighting off demons, and talked about it on her story, and her friends were all saying that she should go for it, and that they would, and that she had talked about me already. She was saying that she was trying to be friends with me and at one point posted a small joke image saying when he’s not into you. I don’t know honestly what to do because I don’t want to potentially hurt anybody and I don’t want to lead anybody on and I also don’t know if I’m really comfortable or capable of being the object of someone’s desire because of my own issues and the need for my own emotional safety, which is more than I think a regular person’s for things like sex. And I also haven’t really had friends with benefits or things like that. I’ve only really had sex in hookups or dynamics where I kind of disassociated the whole time and then didn’t really stay as friends with them.
The Useful Tension
The Israel bonds debate offers a window into one of the central challenges of modern democracy: reconciling legal constraints, moral imperatives and democratic choice.
When I began exploring the efficacy of Amnesty International's petition concerning the sale of Israel Government bonds, I quickly found myself sinking into a quagmire of imperatives, standards, legislation and statutory orders.
Even during the initial research, fact-checking and drafting, the piece expanded from a planned 1,500 words to more than 5,000. Then it became two essays. I split it again, allowing breakout boxes to carry some of the technical detail. Yet it still felt like wading through a bog. And that's something I used to enjoy. So I stopped and let the sediment settle.
Three days later, I sat down at my desk with a blank page and asked myself a simple question: What actually matters here? The answer turned out to be surprisingly short.
1: Ireland's Constitution commits the State to peace, international justice and respect for international law.
2; The Central Bank is legally structured to apply financial law and regulation, not to make independent foreign-policy or moral judgments about states.
3; The Irish Government may believe stronger action is justified, but argues that EU treaty arrangements limit how far a single member state can act alone.
4: EU sanctions policy generally depends on unanimity, meaning one state's position can be blocked by disagreement among the others.
That was it. Everything else seemed to arise from the interaction between those four statements. At that point I realised I was no longer writing about Israel bonds. I was looking at a recurring tension within modern democratic governance: the relationship between legal frameworks, moral imperatives and democratic authority.
Once that became clear, a new essay almost wrote itself.
The insight gained from that detour will now inform my return to the original question: not whether the tension exists, but whether campaigns such as Amnesty International's can play a meaningful role in testing it.
Read the essay https://rvw.ie/the-useful-tension>
David Marshall
Sna Sceirí
A few strong opinions about AI
from  Noisy Deadlines
Noisy Deadlines
I’ve been thinking about AI for a while now, since I am increasingly being surrounded by AI tools at work, with Microsoft adding a Copilot button everywhere I look. But that’s a topic for another time.
What inspired me to write here was the recent controversy within the Blaugust community about the use of AI-generated images and text. And I knew about this controversy after reading Andreas’ post: Are we becoming too paranoid about AI slop? And then the contribution to the topic by Joel: Not paranoid, but respectful.
I read the Blaugust Statement “Use of AI as a Blaugust Participant” and I found it made total sense, allowing AI assistance but not using it to substantially generate text. I believe most bloggers cherish the writing craft: having an idea, a thought, an emotion and putting it all into words for other human beings to read.
I occasionally will use AI to “proofread” a text that I wrote to catch grammar and vocabulary mistakes, since English is not my native language. Other than that, I avoid using AI chatbots. I don’t like chatting with them. And that’s just me, I think the systemic harms these tools are causing to our society greatly outweigh the benefits right now.
It seems the real Blaugust controversy was about the use of generative AI images. The Blaugust Statement actually accepts the use of some AI-generated images:
An AI-generated image accompanying a human-written article is acceptable; a post whose only substantive creative element is an AI-generated image would not meet the spirit of the event.
And that’s okay, since the main work is focused on the text, not on the image itself.
Now some strong opinions.
As of today, I don’t consider that AI-generated images with the use of prompts are human art. Or craftsmanship. Or anything that can be considered art by human standards. There is no soul behind it; there is no human brain that made big or small deliberate choices to craft that image. It’s like using a slot machine to randomly generate something. Can that be considered an artistic choice?
Maybe these artifacts will become something different in the future, but today I feel that AI-generated content, be it image or text, is slop. I don’t like it when I see it; I can recognize this uncanny feel to it, and I basically avoid it at all costs.
And that’s just my personal stand at the moment. I have the power to choose what I consume online, and I just stay away from places or services that “serve” this type of content.
—
Note: I didn’t have time to proofread this with an AI tool before posting, so all mistakes are my own.
Post 03 of #Blaugust #NoisyMusings #AI
When the FBI Cannot Prove It Is the FBI: Deepfake Recovery Scams
from  SmarterArticles
SmarterArticles

In mid-September 2025, people who had just been robbed online went looking for the place where you report being robbed online. Some never arrived. Instead of ic3.gov, the Internet Crime Complaint Center operated by the FBI, they landed on ic3-gov.com, or ic3gov.org — domains carrying the Bureau's seal, the IC3 banner and the same institutional blue as the real thing. Analysts identified the first wave on 18 September; the Bureau published a warning the following day, telling the public to type the address manually, check the domain ends in .gov, and ignore sponsored search results.
Ten months later, on 20 July 2026, the same centre issued a further alert, numbered I-072026-PSA, describing something more elaborate. Criminals were no longer merely cloning the website. They were building fake social media profiles for FBI personnel, opening conversations with fraud victims on Facebook Messenger, then moving those conversations to Telegram, where they sent links to spoofed complaint portals harvesting names, telephone numbers, email addresses, the type of scam suffered and the amount lost, before issuing a fabricated reference number and asking for more. And they were circulating AI-generated video of senior FBI officials, urging viewers to file complaints at an address that was not the FBI's, and generating synthetic video for real-time video chats in which the person on the call appeared to be a law enforcement official.
The Bureau's central corrective was blunt and slightly melancholy: the IC3 does not maintain a social media presence, does not contact individuals directly through messaging platforms, and will never ask for payment to recover lost funds. An agency whose entire function is to be the trustworthy destination for people who have just been deceived now spends its public communications explaining the circumstances under which it does not exist.
This is not a new category of crime. Refund and recovery fraud — a stranger promising, for a fee, to retrieve money you have already lost — is old enough to have generated decades of consumer warnings. What has changed is production quality and the precision of the targeting. The question is not whether people should be more careful. It is who, among the platforms carrying the contact, the agency whose face is borrowed and the legislators who have not written the relevant law, is responsible for the second wound.
What the Bureau Has Warned About, Twice Before
The July 2026 alert is the third in a sequence, and the escalation is clearer in retrospect.
The first came on 18 April 2025, reporting that between December 2023 and February 2025 the FBI had received more than one hundred complaints about people impersonating IC3 employees. Contact arrived by email, telephone, social media or online forums. Almost every complainant said the impersonator had claimed either to have recovered their lost funds or to be able to assist in recovering them. The Bureau described one recurring pattern in which scammers created female persona profiles, joined online groups for fraud victims, presented themselves as fellow victims, then referred members to a supposed senior official reachable on Telegram. The tactics were essentially conversational: someone lied to you in writing.
The second, in September 2025, concerned infrastructure rather than personas: look-alike domains intercepting traffic intended for the real portal, and deceptive emails purporting to confirm complaints victims had never submitted.
The third fuses the two and adds synthetic video. Security analysts characterised the scheme as considerably more polished than the earlier warning had described, evolving from text-only approaches into something resembling an official government process from beginning to end: a video of an official, a website that looks like a government website, a form, a reference number, a follow-up. Each element is individually unremarkable. Assembled in sequence, they reconstruct the ritual of reporting a crime to the state.
One detail deserves precision. Reporting describes deepfake videos of senior FBI officials, but neither the alert nor the press coverage appears to identify which officials were depicted; any description of the scheme as targeting a specific, named executive should be treated as unverified.
The FBI's detection advice, repeated from a December 2024 alert on criminal use of generative AI, tells you a great deal about the state of the defence. Look for distorted hands, unrealistic eyes, implausible jewellery, inaccurate shadows, lag between lip movement and voice. These were reasonable heuristics in 2023. As guidance for someone confronted with a short, compressed clip on a phone screen in 2026, they are closer to ritual than method. The July alert concedes as much, noting that AI-generated content has become so sophisticated that it is increasingly difficult to detect. The checklist degrades further still when the synthetic face is on a live call rather than in a recorded clip: nothing can be paused, rewound or examined a second time, and the ordinary pressure to answer while someone waits on the other end removes the interval in which scrutiny would happen. A heuristic that assumes the viewer can look twice is of limited use to a person who cannot look twice.
Why the Freshly Defrauded Are the Most Valuable Targets
The strategic insight behind recovery fraud is that a person who has just lost money is not a worse target than a person who has not. They are a better one.
This is counterintuitive only if you assume that being scammed produces caution. The consumer protection literature has long documented so-called sucker lists — records of prior victims containing name, telephone number, scam type and sum lost, traded among criminal operators on the theory that someone who paid once may pay again. The Federal Trade Commission has warned about these lists and the approach they enable, in which the caller already knows what happened to you — itself the most persuasive credential available.
The academic evidence is stronger than generally appreciated, because one dataset is unusually good. Marguerite DeLiema of the University of Minnesota and Lynn Langton of RTI International analysed two decades of records seized from fraud organisations by the United States Postal Inspection Service, covering more than two million victims. Because this was transactional data rather than survey responses, it recorded what people did rather than what they would admit. Revictimisation rates rose with age in certain scam categories. The ten thousand most frequently responsive individuals had responded to fraudulent solicitations between 82 and 562 times each. Their average age was 78.
That is not a portrait of gullibility. It is a targeting system working as designed, applied repeatedly to people identified as responsive and who are, by the fiftieth approach, in a psychological state the fraud itself produced.
A 2025 qualitative study in the journal Victims and Offenders, based on interviews with twelve cyberscam victim-survivors and eight of their friends and family members, found pervasive impacts: distress, shame, decay of trust, conflict within families, support needs largely unmet. Shame does specific structural work. It discourages disclosure to family, removing the most reliable circuit-breaker in fraud — a second opinion from someone not emotionally invested in the outcome. It also makes the victim receptive to any approach that treats them as a legitimate claimant rather than a fool. Layered on top is escalation of commitment: the more a person has lost, the more expensive it becomes to accept the loss is final. A recovery scam is an offer to undo the first fraud, aimed at someone for whom that has become the organising priority of their week.
What the July 2026 alert adds is timing. The scheme targets people who have recently reported financial fraud or expressed an intention to do so — a window in which two conditions coincide and neither lasts long: financial desperation peaks, and trust in law enforcement is momentarily very high, because the victim has just voluntarily reached out to it. Filing an IC3 complaint is an act of hope. The scheme is built to intercept it.
The underlying market is not small. The Global Anti-Scam Alliance, in a report with the analytics firm Feedzai published in October 2025, surveyed 46,000 adults across 42 markets: 57 per cent had encountered a scam in the previous twelve months, 23 per cent had lost money, and only around 30 per cent of those who reported to their payment provider recovered anything. That gap is the space recovery fraud occupies.
A Record Year and the Cohort Absorbing It
The FBI's 2025 Internet Crime Report, published in April 2026, supplies the backdrop. The IC3 received 1,008,597 complaints, the first time in its twenty-five-year history that annual volume exceeded one million. Reported losses reached $20.877 billion, a 26 per cent increase on the $16.6 billion recorded in 2024.
Investment fraud remained the largest driver at more than $8.6 billion, followed by business email compromise at more than $3 billion and technical support fraud at $2.1 billion. Cryptocurrency featured in more than $11 billion of losses across 181,565 complaints. For the first time the report used AI-related as a formal descriptor, recording 22,364 complaints and roughly $893 million in losses — a floor rather than a measurement, since it captures only cases where the victim knew, and thought to say, that artificial intelligence was involved.
The elder fraud figures make the recovery scam legible as a strategy. Americans aged 60 and over filed 201,266 complaints in 2025 and reported losses of $7.75 billion, an annual increase of 59 per cent. The average loss in that group was around $38,500, and roughly 12,400 individuals lost more than $100,000 each. Investment fraud accounted for $3.52 billion of that total and technical support fraud for $1.04 billion. Complainants over 60 made up roughly a fifth of all complaints but close to 37 per cent of all reported losses.
The Federal Trade Commission's data tells a compatible story by a different method. Consumers filed more than a million imposter scam reports in 2025 and reported $3.5 billion in losses, making impersonation the most-reported fraud category for the fifth consecutive year. Around $920 million was attributed to government impersonators, up from $789 million in 2024, with such reports rising about 40 per cent year on year.
What the Evidence Actually Supports About Age and Synthetic Media
It is tempting to close the loop between those datasets by asserting that older adults are least able to recognise AI-generated video and audio and are therefore uniquely exposed. The claim is plausible. It is also more slippery than it looks, and the published research supports a narrower version than the one usually stated.
Start with what is reasonably well evidenced: awareness. A study by the biometric authentication firm iProov, based on 2,000 consumers in the United Kingdom and United States exposed to genuine and synthetic images and video, found that 30 per cent of respondents aged 55 to 64 and 39 per cent of those aged 65 and over had never heard of deepfakes at all, against 22 per cent overall. You cannot look for something you do not know exists.
The same study cuts against any simple generational framing. Only 0.1 per cent of participants correctly identified every genuine and synthetic item shown, participants were around 36 per cent less likely to identify a synthetic video than a synthetic image, and adults aged 18 to 34 displayed the largest gap between measured performance and self-assessed confidence. If detection is the defence, the defence is failing across the age range, and the group most likely to over-trust its own judgement is not the oldest.
Direct experimental evidence on age and accuracy is thinner than the discourse suggests. A study of audiovisual deepfake perception by Ammarah Hashmi and colleagues, which asked 110 participants to judge forty videos, reported that its oldest age band performed less accurately than younger bands — but that band was 41 to 50. It says nothing directly about people over 60, because it did not measure them separately. It also found every AI model tested outperformed every human, and that people systematically overestimated their own ability.
Qualitative work has looked specifically at seniors. Research by Zhiwei Tang, Dion Goh, Chei Sian Lee and Yang Yang, based on interviews with twenty participants aged 55 to 70, found they gravitate towards judgements about the authenticity of the video's subject rather than peripheral technical details, preferring intuition over consulting other people or verification resources. A comparative study in the International Journal of Human–Computer Interaction found both groups drawing on similar cue categories, with seniors leaning more on accumulated life experience.
That is more useful than an accuracy ranking, and it explains the scheme's design. If older adults assess a video by asking whether the person in it seems authentic, rather than inspecting shadows and hand geometry, a synthetic clip of a plausible official speaking plausible institutional language defeats the strategy at the point it is applied. The vulnerability is not primarily perceptual. It is that the heuristic in use is the one generative video is now good at satisfying.
One further consideration is lost in the focus on detection. The FBI's Operation Level Up, which proactively identifies people being defrauded and telephones them, notified 3,780 victims during 2025 and estimates it prevented $225.9 million in losses. Seventy-eight per cent of those contacted did not know they were being scammed. Detection was not failing at the margin. It was absent.
First Contact Happens on Someone Else's Platform
Every version of this scheme begins somewhere. In the July 2026 alert it begins on Facebook Messenger and migrates to Telegram, with deepfake videos circulating on social platforms to drive traffic. That is a specific, addressable fact about infrastructure, not an act of God.
Meta has not been idle. In March 2026 it announced a package of anti-scam measures, reporting that it had removed 159 million scam advertisements during 2025, with 92 per cent taken down before any user reported them, and disabled 10.9 million accounts across Facebook and Instagram linked to organised scam centres. In February 2026 it filed lawsuits against deceptive advertisers in Brazil, China and Vietnam, and set a target of raising the share of advertising revenue from verified advertisers from 70 to 90 per cent by the end of 2026.
Those are not trivial numbers, but they concern advertising and mass-scale account networks. The IC3 scheme requires neither. It requires one fake profile, one direct message to a person who has just posted in a fraud victims' support group, and a link. Direct messaging between two consenting parties is the hardest surface on any platform to police, and it is where this scheme lives.
Telegram is the second half of the pattern, and the conversation is moved there deliberately. The platform's posture shifted after the arrest of its founder Pavel Durov in France in August 2024, part of an investigation into insufficient moderation of illegal activity, after which Telegram began cooperating with law enforcement and expanded takedowns. Security researchers report enforcement at extraordinary scale — tens of millions of channels and groups blocked during 2025. The same research finds criminal ecosystems on the platform are not shrinking: groups use join-request gating to defeat automated moderation and maintain pre-built backup channels allowing near-instant reconstitution after removal.
This is the recurring shape of platform enforcement statistics: volume of removals measures activity, not outcome. A scheme that needs one working channel at a time, and can rebuild it in minutes, is largely indifferent to a takedown rate expressed in hundreds of thousands per day.
There is also a structural blind spot no enforcement budget resolves. Once a conversation moves into an encrypted direct message the platform has no view of its contents, and the design decision producing that blindness is the same one producing the privacy guarantee users are entitled to expect. Any proposal to fix scam contact by giving platforms visibility into private messages is a proposal to remove encryption. Direct-message fraud must therefore be addressed through weaker signals — account age, behavioural patterns, the profile claiming to represent a federal agency.
Two Continents and Two Answers on Platform Duty
Whether any of this becomes a legal obligation depends enormously on jurisdiction.
In the United States, Section 230 of the Communications Decency Act has historically meant a platform is not the publisher of a fake FBI profile created by a user, and that losses flowing from it are not the platform's to answer for. The precedent most on point is unhelpful to victims: in Herrick v. Grindr, involving an impersonating profile used to direct strangers to the plaintiff, the court dismissed the claim even where the harm was framed as a product defect, because the injury still originated in content supplied by another user.
That settlement is being tested. On 10 April 2026 the Massachusetts Supreme Judicial Court ruled unanimously in Commonwealth v. Meta Platforms that Section 230 did not immunise Meta from state consumer-protection and tort claims where the alleged harms stemmed from the company's own conduct — the design of platform features and misleading statements about safety — rather than from third-party content. The case concerns Instagram's effects on children rather than fraud, but the reasoning is portable: if a claim can be framed around how a service was built and what its operator said about it, the immunity does less work. Litigation directly about scam advertising is under way, including a class action filed against Meta in April 2026 alleging that the company profits from scam advertisements while misleading users.
Europe imposes systemic duties instead of litigating individual harms. Under the Digital Services Act, large platforms must maintain effective mechanisms against fraudulent advertising and mitigate the resulting risks. On 21 May 2026 the European consumer organisation BEUC, with 29 member groups, filed complaints against Meta, Google and TikTok with the European Commission and national Digital Services Coordinators. Between December 2025 and March 2026 the groups flagged almost 900 advertisements suspected of breaching EU law. The platforms removed 27 per cent; 52 per cent of reports were rejected or ignored. BEUC estimates the fraudulent advertising still running reaches more than 200 million European consumers a month.
The United Kingdom's approach under the Online Safety Act reached a concrete stage almost exactly as the FBI published its alert. On 10 July 2026 Ofcom opened a consultation, running until 2 October, on a draft Fraudulent Advertising Code of Practice containing close to forty measures for the largest categorised services: banning fraudulent advertisers and preventing re-registration, verifying advertiser identity, and testing AI-driven ad creation tools for misuse. Non-compliance carries penalties up to £18 million or 10 per cent of global revenue.
The limitation is written into the scope. The draft code covers paid advertising. It does not cover user-generated content, and it does not cover organic search results. A deepfake video posted to a feed rather than bought as an advertisement, followed by a direct message from a fake profile, falls outside it. The most advanced fraud-specific platform regulation in the democratic world addresses the part of the IC3 scheme that is optional, and not the part that is essential.
The Domain Nobody Can Quite Protect
The FBI's advice — type ic3.gov manually, check the .gov — reflects a real structural advantage and a real structural limit.
The advantage is that .gov is a genuinely controlled space. Under the DOTGOV Act of 2021, the Cybersecurity and Infrastructure Security Agency administers the top-level domain, restricting registration to verified United States federal, state, local, tribal and territorial entities, mandating multi-factor authentication and enforcing HTTPS. Nobody registers a fraudulent .gov domain, because nobody can.
The limit is that this forces the fraud one character sideways. The September 2025 spoofs used ic3-gov.com and ic3gov.org: ordinary commercial domains, registrable in minutes by anyone with a payment method, and no mechanism exists by which CISA or the FBI can prevent their creation. Suppression happens afterwards, through abuse reports to registrars and hosting providers, and the timing is unfavourable. Academic analysis of phishing domain lifecycles finds that although some malicious sites vanish within hours, the average interval between detection and deregistration runs to roughly 11.5 days, and squatted domains impersonating a specific brand persist on the order of three weeks. A scheme that needs the site live only long enough for a victim who received a Telegram link this morning to complete a form this afternoon is entirely compatible with an eleven-day takedown.
Provenance signalling is the technology most often proposed for the video half of the problem. The Coalition for Content Provenance and Authenticity has assembled a substantial standard and a very large membership, and the idea is sound: cryptographically sign content at creation so that origin and edit history travel with it. But C2PA manifests are removable by design and fragile in practice. Embedded manifests are lost whenever a file is re-saved by a tool that is not provenance-aware, and mainstream platforms routinely re-encode media on upload, stripping credentials as a by-product of transcoding rather than by deliberate act. Durable variants combining watermarking and fingerprinting improve matters, but the asymmetry remains: provenance proves that something is what it claims to be, and cannot prove that unsigned content is fake. Where most authentic video also carries no credential, absence of provenance signals nothing.
Detection is the other proposed answer, and the honest reading is discouraging. Deepfake detectors routinely report accuracy above 99 per cent on established academic benchmarks. Evaluated against Deepfake-Eval-2024, built from synthetic media actually circulating on social platforms, state-of-the-art open-source models fell precipitously, with reported reductions in area-under-curve of around 50 per cent for video, 48 per cent for audio and 45 per cent for images. Detectors are good at recognising the generators they were trained on. The generator used to make next month's video does not exist yet.
An Impersonation Statute Written for Badges, Not Pixels
The legal position in the United States is not that impersonating an FBI official is lawful. It is that the statutes were written for a different medium and scaled for a different volume.
Section 912 of Title 18 of the United States Code makes it an offence to falsely pretend to be an officer or employee of the United States and either act as such or, under that pretence, obtain anything of value. The maximum sentence is three years. It is adequate for the person who flashes a false badge, and adequate for whoever runs the IC3 scheme — assuming they are within reach of American jurisdiction, which offshore fraud infrastructure makes unlikely. What it does not reach is the production of the synthetic video, or any duty for the intermediaries distributing it.
The Federal Trade Commission's Government and Business Impersonation Rule, in force since 1 April 2024, is more modern. It prohibits fraudulent impersonation of government agencies and their officers, and lets the Commission seek monetary redress directly in federal court. When it finalised that rule the Commission simultaneously proposed extending the prohibition to impersonation of individuals, citing AI-generated deepfakes as a technology threatening to turbocharge impersonation fraud, and floated a provision imposing liability on parties supplying goods or services — including AI tools — with reason to know they would be used for unlawful impersonation. After an informal hearing in January 2025 the Commission indicated it would not proceed with that means-and-instrumentalities provision, and as of mid-2026 regulatory trackers record the extension to individuals as unfinalised. The proposal that would have reached the toolmakers is the one that was dropped.
Federal deepfake legislation exists but is narrow. The TAKE IT DOWN Act, signed on 19 May 2025, criminalises knowing publication of non-consensual intimate imagery including AI-generated digital forgeries, and requires covered platforms to remove reported material within 48 hours; platforms had until 19 May 2026 to build the process, and the FTC began enforcement that month. It is a real law with real teeth and nothing to say about a synthetic FBI official, because its subject is intimate imagery. The NO FAKES Act, which would create a federal property right in an individual's voice and visual likeness against unauthorised digital replicas, was advanced by the Senate Judiciary Committee on 18 June 2026 and is closer to enactment than in any previous session, but is still not law — and would primarily empower the depicted individual, here a serving federal official suing over a video that has already emptied someone's savings account. State law is dense but uneven: most states have enacted legislation addressing AI-generated media, roughly thirty have election-specific provisions, and every state has non-consensual intimate imagery protections, though many predate generative AI. The coverage is real; the coherence is not, and none of it binds a criminal operating from outside the country.
The European Union is about to attempt transparency at scale. Article 50 of the AI Act imposes obligations applying from 2 August 2026: deployers producing deepfakes — content resembling existing persons or events and falsely appearing authentic — must disclose it, and outputs of generative systems must be identifiable as artificially generated in machine-readable form. Under the Digital Omnibus agreement the general transparency duties bite on that date, while the machine-readable marking obligation is deferred to 2 December 2026 for systems already placed on the market before it. Infringements can attract penalties up to €15 million or 3 per cent of worldwide turnover. The gap is obvious. Criminals will not label their output, and the penalties are calibrated for corporate non-compliance rather than criminal enterprise. What Article 50 may achieve is a norm in which unmarked synthetic content becomes anomalous. That is worth something. It is not protection.
The Case for Restraint
There are decent arguments against every intervention above, and they deserve stating properly rather than as formality.
Criminalising synthetic impersonation of officials in broad terms would collide with the First Amendment. Depictions of government figures are core political speech, and satire, parody and criticism routinely involve putting words into the mouths of public officials. A statute drawn tightly enough to catch a fraudulent recovery-scam video, and loose enough to survive drafting by a legislature under pressure, is likely to catch protected expression too. Fraud-specific framing — requiring intent to deceive for financial gain — narrows the problem, but largely duplicates fraud statutes that already exist.
Platform liability rules carry a documented failure mode. Where a service faces penalties for content it fails to remove and none for content it removes wrongly, the rational response is aggressive removal, and the material caught in that net is disproportionately produced by people without resources to appeal. A 48-hour takedown obligation is defensible for a narrow category. Generalised to impersonation — which includes every parody account and every critical commentary adopting an institutional voice — it becomes something else.
Provenance and detection both invite over-reliance. If the public is trained to treat a content credential as proof of authenticity, the first successful credential-laundering technique produces harm greater than the tool prevented, because it exploits a trust the tool created. And a detection system right 95 per cent of the time tells five per cent of victims their genuine evidence is fake.
There is also a case that resources are better spent elsewhere. A randomised controlled trial by DeLiema, M. Daniel Brannock, Edward Preble and Langton, published in Innovation in Aging in 2024, tested mailed interventions with prior fraud victims. A single warning letter from the Postal Inspection Service reduced revictimisation by 8.6 per cent over four months; the same letter followed by five further mailings achieved a 22.4 per cent reduction. That is an unglamorous intervention delivered by post, and it protected a population no deepfake detector has ever helped. The cheapest thing demonstrably working is a letter.
Where the Cost of Vigilance Actually Lands
The advice at the end of the FBI's alert is sound, and worth reading for what it assumes. Type the address manually. Avoid sponsored search results. Verify the .gov. Do not trust social media profiles or messaging apps claiming to represent the IC3. Look for distorted hands and inaccurate shadows.
Every one of those instructions transfers a cost onto the person least able to bear it. The recipient has just lost money. They may be in their seventies. They may not know what a sponsored search result is, or why a domain suffix matters, or that ic3-gov.com and ic3.gov are not variants of the same thing. Asking them to perform forensic analysis on a video asks them to succeed where 99.9 per cent of iProov's participants failed.
There is a deeper incoherence in the advice, and it is nobody's fault. The IC3 says it will never contact you. But Operation Level Up exists precisely because the FBI does contact victims — proactively, by telephone, unsolicited — and 78 per cent of those it reached in 2025 had no idea they were being defrauded until the Bureau told them. The public is asked to hold two rules at once: an unsolicited approach from the FBI is a red flag, and an unsolicited approach from the FBI may be the intervention that saves your retirement. Distinguishing them requires exactly the institutional literacy this cohort has least of, and that the scheme is engineered to exploit.
That incoherence is the argument for shifting the burden. Not because individuals bear no responsibility, but because the current allocation is arithmetically absurd. On one side is a person defrauded once, in the worst week of their financial life, asked to authenticate synthetic video. On the other are entities that can act structurally: the platform that can require verification before an account claims to represent a federal agency; the registrar that can decline to sell ic3-gov.com; the agency that can establish a single cryptographically verifiable channel through which victims confirm a complaint's status; and the legislature that can extend a mid-century impersonation statute to the medium in which impersonation now happens, and finalise a rulemaking it began in 2024.
None of these is difficult in the way detecting deepfakes is difficult. They are difficult in the way assigning liability is always difficult, which is to say politically rather than technically. The IC3 scheme is not a story about the frontier of artificial intelligence; the tools involved are commodity products. It is a story about an institution whose credibility is its only real asset discovering that credibility is cheap to counterfeit and expensive to defend, and about a legal architecture that has not decided whose problem that is.
The scheme's designers have already answered the question. They decided it was the victim's problem, and built accordingly.
References
- FBI Internet Crime Complaint Center, “FBI Warns of Scammers Impersonating the IC3,” Alert Number I-072026-PSA, 20 July 2026. https://www.ic3.gov/PSA/2026/PSA260720
- FBI Internet Crime Complaint Center, “FBI Warns of Scammers Impersonating the IC3,” Alert Number I-041825-PSA, 18 April 2025. https://www.ic3.gov/PSA/2025/PSA250418
- FBI Internet Crime Complaint Center, “Threat Actors Spoofing the FBI IC3 Website for Possible Malicious Activity,” 19 September 2025. https://www.ic3.gov/PSA/2025/PSA250919
- FBI Internet Crime Complaint Center, “Criminals Use Generative Artificial Intelligence to Facilitate Financial Fraud,” 3 December 2024. https://www.ic3.gov/PSA/2024/PSA241203
- Federal Bureau of Investigation, “Cryptocurrency and AI Scams Bilk Americans of Billions,” April 2026. https://www.fbi.gov/news/press-releases/cryptocurrency-and-ai-scams-bilk-americans-of-billions
- Federal Bureau of Investigation, “Operation Level Up,” accessed 25 July 2026. https://www.fbi.gov/how-we-can-help-you/victim-services/national-crimes-and-victim-resources/operation-level-up
- Federal Trade Commission, “FTC Data Show People Reported Losing $3.5 Billion to Imposter Scams in 2025,” June 2026. https://www.ftc.gov/news-events/news/press-releases/2026/06/ftc-data-show-people-reported-losing-3-point-5-billion-imposter-scams-2025
- Federal Register, “Trade Regulation Rule on Impersonation of Government and Businesses,” 1 March 2024. https://www.federalregister.gov/documents/2024/03/01/2024-04335/trade-regulation-rule-on-impersonation-of-government-and-businesses
- Congress.gov, “S.4591 — NO FAKES Act of 2026, 119th Congress,” 2026. https://www.congress.gov/bill/119th-congress/senate-bill/4591/text
- Massachusetts Supreme Judicial Court, “Commonwealth v. Meta Platforms, Inc.,” SJC-13747, 10 April 2026. https://law.justia.com/cases/massachusetts/supreme-court/2026/sjc-13747.html
- Gibson Dunn, “EU AI Act Omnibus Agreement — Postponed High-Risk Deadlines and Other Key Changes,” 2026. https://www.gibsondunn.com/eu-ai-act-omnibus-agreement-postponed-high-risk-deadlines-and-other-key-changes/
- BEUC, “Consumer groups file complaints against Meta, TikTok and Google for failing to protect consumers against financial scams,” 21 May 2026. https://www.beuc.eu/press-releases/consumer-groups-file-complaints-against-meta-tiktok-and-google-failing-protect
- Ofcom, “Consultation: Fraudulent Advertising Code of Practice, Volume 1 — Context,” 10 July 2026. https://www.ofcom.org.uk/siteassets/resources/documents/consultations/category-3-4-weeks/consultation-fraudulent-advertising-code-of-practice/main-documents/volume-1-context.pdf
- Meta, “Fighting Scammers and Protecting People With New Technology and Partnerships,” March 2026. https://about.fb.com/news/2026/03/fighting-scammers-protecting-people-with-new-technology-and-partnerships/
- Check Point Research, “Telegram's Crackdown in 2026 and Why Cyber Criminals Are Still Winning,” 2026. https://blog.checkpoint.com/research/telegrams-crackdown-in-2026-and-why-cyber-criminals-are-still-winning/
- Marguerite DeLiema and Lynn Langton, “Older Victims of Mass Marketing Scams: An Analysis of Data Seized From Scammers,” Innovation in Aging, December 2021. https://pmc.ncbi.nlm.nih.gov/articles/PMC8679313/
- Marguerite DeLiema, M. Daniel Brannock, Edward Preble and Lynn Langton, “A Fraud Awareness Mail Campaign Significantly Reduces Rates of Revictimization Among Older Victims,” Innovation in Aging, 2024. https://pmc.ncbi.nlm.nih.gov/articles/PMC11689558/
- Cazanis, Carminati, Chew, Cross, Ponsford and Gould, “'Falling into a Black Hole': A Qualitative Exploration of the Lived Experiences of Cyberscam Victim-Survivors and Their Social Support Networks,” Victims and Offenders, 2025. https://www.tandfonline.com/doi/full/10.1080/15564886.2025.2481267
- iProov, “Study Reveals Deepfake Blindspot: Only 0.1% of People Can Accurately Detect AI-Generated Deepfakes,” 2025. https://www.iproov.com/press/study-reveals-deepfake-blindspot-detect-ai-generated-content
- Ammarah Hashmi, Sahibzada Adil Shahzad, Chia-Wen Lin, Yu Tsao and Hsin-Min Wang, “Unmasking Illusions: Understanding Human Perception of Audiovisual Deepfakes,” arXiv:2405.04097, 2024. https://arxiv.org/abs/2405.04097
- Zhiwei Tang, Dion Hoe-Lian Goh, Chei Sian Lee and Yang Yang, “Understanding strategies employed by seniors in identifying deepfakes,” Aslib Journal of Information Management, 2026. https://www.emerald.com/ajim/article/78/2/430/1248679/Understanding-strategies-employed-by-seniors-in
- “Understanding Deepfake Detection Strategies Among Young Adults and Seniors,” International Journal of Human–Computer Interaction, 2025. https://www.tandfonline.com/doi/full/10.1080/10447318.2025.2607571
- “Deepfake-Eval-2024: A Multi-Modal In-the-Wild Benchmark of Deepfakes Circulated in 2024,” arXiv:2503.02857, 2025. https://arxiv.org/html/2503.02857v1
- “Registration, Detection, and Deregistration: Analyzing DNS Abuse for Phishing Attacks,” arXiv:2502.09549, 2025. https://arxiv.org/pdf/2502.09549
- Global Anti-Scam Alliance and Feedzai, “Global State of Scams Report 2025,” 7 October 2025. https://gasa.org/knowledge-base/reports/global-state-of-scams-2025

Tim Green UK-based Systems Theorist & Independent Technology Writer
Tim explores the intersections of artificial intelligence, decentralised cognition, and posthuman ethics. His work, published at smarterarticles.co.uk, challenges dominant narratives of technological progress while proposing interdisciplinary frameworks for collective intelligence and digital stewardship.
His writing has been featured on Ground News and shared by independent researchers across both academic and technological communities.
ORCID: 0009-0002-0156-9795 Email: tim@smarterarticles.co.uk
Listen to the free weekly SmarterArticles Podcast
The Pastor Is Just the Bus Driver
There is something an old evangelist once said that has stayed with me for years.
He said, “The pastor’s job is really the job of a bus driver.”
That’s it.
The driver doesn’t decide who gets on the bus. He doesn’t decide who stays for the whole ride. He doesn’t decide who gets off. His job is simply to keep driving.
That’s the calling of a pastor.
I don’t own the church. Jesus does.
I don’t choose who walks through the doors. I don’t choose who leaves. I simply try, by the grace of God, to keep pointing people to Jesus and keep the bus headed toward home.
But if I’m honest…
There are people who left years ago, and I still think about them.
I remember their faces. Their laughter. Their tears. The prayers we prayed together. The victories we celebrated. The burdens we carried. Then one day… they were gone.
I don’t say their names because this isn’t about guilt. It’s about love.
I simply wonder…
Are they happy?
Have they found a church family that truly loves them?
Have they found a place where their gifts are being used for the Kingdom of God?
Most of all…
Have they tasted and seen that the Lord is still good?
I pray for them.
Not because I want to fill pews.
Because I love people.
If they’ve found a church where they are growing in Christ, serving with joy, and flourishing, then my heart rejoices. Praise God! That’s exactly what I want for them.
But if they’re wandering…
If they’re hurting…
If they still haven’t found where they belong…
Then I quietly ask the Good Shepherd to bring them home—whether that’s here at the Lord’s Table or wherever He knows they will grow best.
Then I pray for the people who are here today.
Lord, let every person who walks through these doors discover the place You created just for them. Let them find their calling. Let them uncover the gifts You’ve placed inside them. Let them become part of something eternal. Let them know they are loved.
And then my heart reaches even farther.
It reaches for the people we’ve never met.
The husband who’s about to give up.
The wife crying herself to sleep.
The teenager wondering if anyone notices.
The widow eating another meal alone.
The family searching for hope.
The man convinced God could never forgive him.
The woman carrying burdens no one else can see.
Lord…
Bring them to Your table.
Let them taste and see that You are good.
Not because our church is perfect.
Not because our pastor has all the answers.
But because Jesus Christ is still saving, still healing, still restoring, still forgiving, and still preparing a place at His table for everyone who will come.
My prayer has never been that this church would simply become bigger.
My prayer is that heaven would become fuller.
May every person who walks through these doors seek first His Kingdom and His righteousness. And may they discover that everything they truly need is found in Christ.
There will always be a place at the Lord’s Table.
And if you’re looking for home…
We saved you a seat.
The Blessing You Never Let Yourself Need
from Douglas Vandergraph | Quiet Christian Reflection
Chapter 1: After Everyone Else Has Gone to Bed
It is nearly midnight, and you are standing in the kitchen packing tomorrow’s lunches. The dishwasher is running. A work email remains unanswered, a prescription needs to be collected in the morning, and someone in the house has already asked whether you remembered the appointment. You did. You usually remember everything because everyone expects you to.
Your phone lights up with a message from a friend: “God bless you. Please get some rest.” You smile, type, “I’m fine,” and place the phone facedown. That quiet reflex sits at the center of this Christian video about receiving God’s blessing when you are always the strong one. You know how to give encouragement, but receiving it makes you uncomfortable.
This hidden weariness belongs beside this reflection on allowing God to care for the person who cares for everyone else. Somewhere along the way, being dependable became part of your identity. You began confusing usefulness with worth. If you are solving the problem, organizing the schedule, or holding someone together, you know where you belong. When you need help, that certainty begins to shake.
So you keep moving. You wipe the counter, check the calendar, and decide sleep can wait. No one has ordered you to carry all of this alone. Still, asking someone else feels risky. They may do it differently. They may see how tired you are. Worse, they may say no, confirming the fear that your needs are inconvenient.
“God bless you” sounds simple until you realize blessing must be received with open hands. You cannot control the form it takes. God may answer through another person carrying part of the load, through a boundary you need to set, or through the humility of admitting that your body and mind have limits. Help can feel like loss of control before it feels like care.
The dishwasher finishes, and the kitchen becomes quiet. You pick up the phone and erase “I’m fine.” This time you write, “I am more tired than I have admitted. Could I call you tomorrow?” The message is not a collapse. It is a small opening. Perhaps God’s blessing has already reached you, waiting for permission to enter.
Chapter 2: What Happens When You Say “I Need Help”
At lunchtime, you sit in your car with the engine off. The parking lot is bright, but you have reclined the seat as though a few quiet minutes might repair weeks of exhaustion. Your friend calls exactly when promised. You consider letting it ring, then answer with the cheerful voice you use when you do not want anyone to worry.
She does not accept “I’m just busy” as the whole answer. She waits through the silence until you admit that you have been sleeping poorly and feeling angry with everyone. Saying it aloud embarrasses you. You expect concern to become judgment. Instead, she says, “That sounds like too much for one person.”
There is relief in being believed. You do not have to prove your exhaustion with a dramatic collapse. God already knows the weight carried behind your capable appearance. Sometimes His care begins when another person sees the strain and does not ask you to justify it.
Your friend offers to collect the prescription and bring dinner. Your first instinct is to decline because accepting will disrupt her day. She reminds you that you have rearranged many days for other people. The sentence lands gently but firmly. You have treated giving as love and receiving as inconvenience, though both require trust.
Receiving help also means accepting that it may not arrive exactly as you would have done it. The meal may be different. The errand may take longer. Someone else may forget the coupon or choose the wrong brand. If care must meet your standards before you accept it, control will keep disguising itself as responsibility.
You finally say yes. Nothing dramatic changes in the parked car. The workday still waits, and the deeper exhaustion will require more than one meal. Yet one burden has moved from your hands into willing hands nearby. “God bless you” begins to feel less like a pleasant wish and more like something God can deliver through the people you once kept outside the door.
Chapter 3: Loved Before the Work Is Finished
That evening, a covered dish sits on the counter, and the prescription bag rests beside it. Someone else has handled both. Your first impulse is to use the extra time to answer email, fold laundry, or clean the refrigerator shelf you noticed that morning. Instead, you carry a glass of water to the porch and sit down.
Rest feels unnatural when your mind has been trained to search for the next unfinished thing. The chair supports your body, but your thoughts keep standing up. You remember tasks, conversations, and future problems. For several minutes, doing nothing feels less like peace and more like guilt.
This is where God’s blessing reaches beneath your schedule. He does not love a future version of you who finally completes everything. He does not wait for your productivity to make you worthy of care. In Christ, you are invited to receive grace before the work is done, while the inbox is full and the kitchen remains imperfect.
Receiving that truth may require small acts of surrender. You let someone else load the dishwasher without correcting the arrangement. You decline one request that can wait. You go to bed before every problem has been solved. These choices may look ordinary, but they challenge the belief that the world is held together by your constant effort.
The evening air cools, and you remain in the chair. Tomorrow will ask something from you, but tonight does not need to be turned into another assignment. “God bless you” can now mean, “May you know that God cares for you even when you are not carrying everyone else.” You do not have to earn the right to receive what His love is already willing to give.
Your friend, Douglas Vandergraph
Explore the complete Douglas Vandergraph Master Index: https://douglasvandergraph.com/douglas-vandergraph-master-index/
Watch Douglas Vandergraph’s faith-based videos on YouTube: https://www.youtube.com/@douglasvandergraph
Tuesday
from  Roscoe's Story
Roscoe's Story
In Summary: * Tuesday's main event (so far, anyway) had me cutting my hair and shaving my beard. Both had become unbearably shaggy and bothersome. No longer. That operation, conducted mostly out on the back porch this morning, was the only time today I was out in the weather. Other than that I've been inside with a/c and ceiling fans running.
Listening now to the Angels pregame show ahead of their game tonight with the Orioles. That game and the night prayers are the only things between me and bedtime. I can handle that.
Prayers, etc.: * I have a daily prayer regimen I try to follow throughout the day from early morning, as soon as I roll out of bed, until head hits pillow at night.
Health Metrics: * bw= 230.49 lbs. * bp= 136/81 (67)
Exercise: * morning stretches, balance exercises, kegel pelvic floor exercises, half squats, calf raises, wall push-ups, BP breathing exercises, pilates
Diet: * 05:15 – 1 banana * 06:25 – 1 ham and cheese sandwich * 11:30 – hambutger patties with mushroom gravy, white bread and butter * 15:50 – 1 fresh apple * 16:20 – dish of ice cream
Activities, Chores, etc.: * 03:30 – listen to local news talk radio * 04:05 – bank accounts activity monitored. * 04:20 – read, write, pray, follow news reports from various sources, surf the socials, nap * 10:00 – haircut and shave * 11:30 to 13:00 – watch old game shows and eat lunch at home with Sylvia * 15:00 – listening to The Jack Show * 16:30 – listening to KLAA Angels Radio AM 830 ahead of tonight's Angels / Orioles game
Chess: * 07:50 – moved in all pending CC games
from librasun.scorpiomoon
You are my dream ... Just not come true
✝️
from  💚
💚
Our Father Who art in Heaven Hallowed be Thy name Thy Kingdom come Thy will be done on Earth as it is in Heaven Give us this day our daily Bread And forgive us our trespasses As we forgive those who trespass against us And lead us not into temptation But deliver us from evil
Amen
Jesus is Lord! Come Lord Jesus! Come Lord Jesus! Christ is Lord!
🐝
from 💚
The apiary be Scottish run to mute Late December this hugger And seeing simply rise What time in Hearst for Will Enough of oak And seeming simpler For five octet and lane And pasture by the law Economy forever- and nines to the Moon Giving ray to God And night shall let us be- the end of war.